-
1 промышленная сеть верхнего уровня
промышленная сеть верхнего уровня
коммуникационная сеть верхнего уровня
сеть операторского уровня
Сеть верхнего уровня АСУ ТП.
Сеть передачи данных между операторскими станциями, контроллерами и серверами.
[ http://kazanets.narod.ru/NT_PART2.htm]В данной статье речь пойдет о коммуникационных сетях верхнего уровня, входящих в состав АСУ ТП. Их еще называют сетями операторского уровня, ссылаясь на трехуровневую модель распределенных систем управления.
Сети верхнего уровня служат для передачи данных между контроллерами, серверами и операторскими рабочими станциями. Иногда в состав таких сетей входят дополнительные узлы: центральный сервер архива, сервер промышленных приложений, инженерная станция и т.д. Но это уже опции.
Какие сети используются на верхнем уровне?
В отличие от стандартов полевых шин, здесь особого разнообразия нет. Фактически, большинство сетей верхнего уровня, применяемых в современных АСУ ТП, базируется на стандарте Ethernet (IEEE 802.3) или на его более быстрых вариантах Fast Ethernet и Gigabit Ethernet. При этом, как правило, используется полный стек коммуникационных протоколов TCP/IP. В этом плане сети операторского уровня очень похожи на обычные ЛВС, применяемые в офисных приложениях. Широкое промышленное применение сетей Ethernet обусловлено следующими очевидными моментами:
1. Промышленные сети верхнего уровня объединяют множество операторских станций и серверов, которые в большинстве случаев представляют собой персональные компьютеры. Стандарт Ethernet отлично подходит для организации подобных ЛВС; для этого необходимо снабдить каждый компьютер лишь сетевым адаптером (NIC, network interface card). Коммуникационные модули Ethernet для промышленных контроллеров просты в изготовлении и легки в конфигурировании. Стоит отметить, что многие современные контроллеры уже имеют встроенные интерфейсы для подключения к сетям Ethernet.
2. На рынке существует большой выбор недорого коммуникационного оборудования для сетей Ethernet, в том числе специально адаптированного для промышленного применения.
3. Сети Ethernet обладают большой скоростью передачи данных. Например, стандарт Gigabit Ethernet позволяет передавать данные со скоростью до 1 Gb в секунду при использовании витой пары категории 5. Как будет понятно дальше, большая пропускная способность сети становится чрезвычайно важным моментом для промышленных приложений.
4. Очень частым требованием является возможность состыковки сети АСУ ТП с локальной сетью завода (или предприятия). Как правило, существующая ЛВС завода базируется на стандарте Ethernet. Использование единого сетевого стандарта позволяет упростить интеграцию АСУ ТП в общую сеть предприятия, что становится особенно ощутимым при реализации и развертывании систем верхнего уровня типа MES (Мanufacturing Еxecution System).
Однако у промышленных сетей верхнего уровня есть своя специфика, обусловленная условиями промышленного применения. Типичными требованиями, предъявляемыми к таким сетям, являются:
1. Большая пропускная способность и скорость передачи данных. Объем трафика напрямую зависит от многих факторов: количества архивируемых и визуализируемых технологических параметров, количества серверов и операторских станций, используемых прикладных приложений и т.д.
В отличие от полевых сетей жесткого требования детерминированности здесь нет: строго говоря, неважно, сколько времени займет передача сообщения от одного узла к другому – 100 мс или 700 мс (естественно, это не важно, пока находится в разумных пределах). Главное, чтобы сеть в целом могла справляться с общим объемом трафика за определенное время. Наиболее интенсивный трафик идет по участкам сети, соединяющим серверы и операторские станции (клиенты). Это связано с тем, что на операторской станции технологическая информация обновляется в среднем раз в секунду, причем передаваемых технологических параметров может быть несколько тысяч. Но и тут нет жестких временных ограничений: оператор не заметит, если информация будет обновляться, скажем, каждые полторы секунды вместо положенной одной. В то же время если контроллер (с циклом сканирования в 100 мс) столкнется с 500-милисекундной задержкой поступления новых данных от датчика, это может привести к некорректной отработке алгоритмов управления.
2. Отказоустойчивость. Достигается, как правило, путем резервирования коммуникационного оборудования и линий связи по схеме 2*N так, что в случае выхода из строя коммутатора или обрыва канала, система управления способна в кратчайшие сроки (не более 1-3 с) локализовать место отказа, выполнить автоматическую перестройку топологии и перенаправить трафик на резервные маршруты. Далее мы более подробно остановимся на схемах обеспечения резервирования.
3. Соответствие сетевого оборудования промышленным условиям эксплуатации. Под этим подразумеваются такие немаловажные технические меры, как: защита сетевого оборудования от пыли и влаги; расширенный температурный диапазон эксплуатации; увеличенный цикл жизни; возможность удобного монтажа на DIN-рейку; низковольтное питание с возможностью резервирования; прочные и износостойкие разъемы и коннекторы. По функционалу промышленное сетевое оборудование практически не отличается от офисных аналогов, однако, ввиду специального исполнения, стоит несколько дороже.
Рис. 1. Промышленные коммутаторы SCALANCE X200 производства Siemens (слева) и LM8TX от Phoenix Contact (справа): монтаж на DIN-рейку; питание от 24 VDC (у SCALANCE X200 возможность резервирования питания); поддержка резервированных сетевых топологий.Говоря о промышленных сетях, построенных на базе технологии Ethernet, часто используют термин Industrial Ethernet, намекая тем самым на их промышленное предназначение. Сейчас ведутся обширные дискуссии о выделении Industrial Ethernet в отдельный промышленный стандарт, однако на данный момент Industrial Ethernet – это лишь перечень технических рекомендации по организации сетей в производственных условиях, и является, строго говоря, неформализованным дополнением к спецификации физического уровня стандарта Ethernet.
Есть и другая точка зрения на то, что такое Industrial Ethernet. Дело в том, что в последнее время разработано множество коммуникационных протоколов, базирующихся на стандарте Ethernet и оптимизированных для передачи критичных ко времени данных. Такие протоколы условно называют протоколами реального времени, имея в виду, что с их помощью можно организовать обмен данными между распределенными приложениями, которые критичны ко времени выполнения и требуют четкой временной синхронизации. Конечная цель – добиться относительной детерминированности при передаче данных. В качестве примера Industrial Ethernet можно привести:
1. Profinet;
2. EtherCAT;
3. Ethernet Powerlink;
4. Ether/IP.
Эти протоколы в различной степени модифицируют стандартный стек TCP/IP, добавляя в него новые алгоритмы сетевого обмена, диагностические функции, методы самокорректировки и функции синхронизации, оставляя при этом канальный и физический уровни Ethernet неизменными. Это позволяет использовать новые протоколы передачи данных в существующих сетях Ethernet с использованием стандартного коммуникационного оборудования.
Теперь рассмотрим конкретные конфигурации сетей операторского уровня.
На рисунке 2 показана самая простая – базовая конфигурация. Отказ любого коммутатора или обрыв канала связи ( link) ведет к нарушению целостности всей системы. Единичная точка отказа изображена на рисунке красным крестиком.
Рис. 2. Нерезервированная конфигурация сети верхнего уровняТакая простая конфигурация подходит лишь для систем управления, внедряемых на некритичных участках производства (водоподготовка для каких-нибудь водяных контуров или, например, приемка молока на молочном заводе). Для более ответственных технологических участков такое решение явно неудовлетворительно.
На рисунке 3 показана отказоустойчивая конфигурация с полным резервированием. Каждый канал связи и сетевой компонент резервируется. Обратите внимание, сколько отказов переносит система прежде, чем теряется коммуникация с одной рабочей станцией оператора. Но даже это не выводит систему из строя, так как остается в действии вторая, страхующая рабочая станция.
Рис. 3. Полностью резервированная конфигурация сети верхнего уровняРезервирование неизбежно ведет к возникновению петлевидных участков сети – замкнутых маршрутов. Стандарт Ethernet, строго говоря, не допускает петлевидных топологий, так как это может привести к зацикливанию пакетов особенно при широковещательной рассылке. Но и из этой ситуации есть выход. Современные коммутаторы, как правило, поддерживают дополнительный прокол Spanning Tree Protocol (STP, IEEE 802.1d), который позволяет создавать петлевидные маршруты в сетях Ethernet. Постоянно анализируя конфигурацию сети, STP автоматически выстраивает древовидную топологию, переводя избыточные коммуникационные линии в резерв. В случае нарушения целостности построенной таким образом сети (обрыв связи, например), STP в считанные секунды включает в работу необходимые резервные линии, восстанавливая древовидную структуры сети. Примечательно то, что этот протокол не требует первичной настройки и работает автоматически. Есть и более мощная разновидность данного протокола Rapid Spanning Tree Protocol (RSTP, IEEE 802.1w), позволяющая снизить время перестройки сети вплоть до нескольких миллисекунд. Протоколы STP и RSTP позволяют создавать произвольное количество избыточных линий связи и являются обязательным функционалом для промышленных коммутаторов, применяемых в резервированных сетях.
На рисунке 4 изображена резервированная конфигурация сети верхнего уровня, содержащая оптоволоконное кольцо для организации связи между контроллерами и серверами. Иногда это кольцо дублируется, что придает системе дополнительную отказоустойчивость.
Рис. 4. Резервированная конфигурация сети на основе оптоволоконного кольцаМы рассмотрели наиболее типичные схемы построения сетей, применяемых в промышленности. Вместе с тем следует заметить, что универсальных конфигураций сетей попросту не существует: в каждом конкретном случае проектировщик вырабатывает подходящее техническое решение исходя из поставленной задачи и условий применения.
[ http://kazanets.narod.ru/NT_PART2.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > промышленная сеть верхнего уровня
-
2 полевая шина
полевая шина
-
[Интент]
полевая магистраль по зарубежной терминологии
Имеет много терминов-синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и исполнительных органов. Магистрали рассчитаны на применение в машиностроении, химической промышленности, в системах автоматизации зданий, крупных установках, бытовых электронных системах, системах автомобильного оборудования, малых контрольно-измерительных и управляющих системах на основе встраиваемых микроЭВМ и т. п. Основными магистралями являются Bitbus, MIL STD-1553В. В настоящее время рабочими группами IEC (65С и SP-50) стандартизируются два основных типа МЛС: высокоскоростные и низкоскоростные, ориентированные на датчики.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]ЧТО ТАКОЕ FIELDВUS?
Так пишется оригинальный термин, который в русском переводе звучит как «промышленная сеть». Fieldbus — это не какой-то определенный протокол передачи данных и не тип сетевой архитектуры, этот термин не принадлежит ни одной отдельно взятой компании и обозначает скорее сферу применения, чем какую-либо конкретную сетевую технологию.
Давайте попробуем сформулировать лишь некоторые основные требования, которые можно предъявить к «идеальной» промышленной сети.
1. Производительность.
2. Предсказуемость времени доставки информации.
3. Помехоустойчивость.
4. Доступность и простота организации физического канала передачи данных.
5. Максимальный сервис для приложений верхнего уровня.
6. Минимальная стоимость устройств аппаратной реализации, особенно на уровне контроллеров.
7. Возможность получения «распределенного интеллекта», путем предоставления максимального доступа к каналу нескольким ведущим узлам.
8.Управляемость и самовосстановление в случае возникновения нештатных ситуаций.
[Сергей Гусев. Краткий экскурс в историю промышленных сетей]
Международный стандарт IEC 61158 “Fieldbus for use in Industrial Control Systems” («Промышленная управляющая сеть для применения в промышленных системах управления») определяет восемь независимых и несовместимых коммуникационных технологий, из которых FOUNDATION Fieldbus H1 и PROFIBUS PA стали в значительной степени преобладающими в различных отраслях промышленности.
Эти промышленные сети соответствуют требованиям стандарта IEC 61158 2, который устанавливает физический уровень так называемых промышленных сетей H1.
Основными требованиями к промышленным сетям H1 являются:
● передача данных и питание устройств нижнего уровня по одной витой паре;
● гибкость при проектировании различных топологий сети;
● совместимость всех полевых приборов;
● взрывобезопасность при установкево взрывоопасных зонах;
● распределение одной инфраструктуры на многочисленные сегменты.[Виктор Жданкин. Концепция FieldConnex® для промышленных сетей FOUNDATION Fieldbus H1 и PROFIBUS_PA: повышение производительности и снижение затрат. СТА 2/2009]
Термин полевая шина является дословным переводом английского термина fieldbus.
Термин промышленная сеть является более точным переводом и в настоящее время именно он используется в профессиональной технической литературе.Промышленная сеть — сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры и используемая в промышленной автоматизации. Термин употребляется преимущественно в автоматизированной системе управления технологическими процессами (АСУТП).
Устройства используют сеть для:
- передачи данных, между датчиками, контроллерами и исполнительными механизмами;
- диагностики и удалённого конфигурирования датчиков и исполнительных механизмов;
- калибрования датчиков;
- питания датчиков и исполнительных механизмов;
- связи между датчиками, исполнительными механизмами, ПЛК и АСУ ТП верхнего уровня.
В промышленных сетях для передачи данных применяют:
- электрические линии;
- волоконно-оптические линии;
- беспроводную связь (радиомодемы и Wi-Fi).
Промышленные сети могут взаимодействовать с обычными компьютерными сетями, в частности использовать глобальную сеть Internet.
[ Википедия]
Главной функцией полевой шины является обеспечение сетевого взаимодействия между контроллерами и удаленной периферией (например, узлами ввода/вывода). Помимо этого, к полевой шине могут подключаться различные контрольно-измерительные приборы ( Field Devices), снабженные соответствующими сетевыми интерфейсами. Такие устройства часто называют интеллектуальными ( Intelligent Field Devices), так как они поддерживают высокоуровневые протоколы сетевого обмена.
Пример полевой шины представлен на рисунке 1.
Рис. 1. Полевая шина.Как уже было отмечено, существует множество стандартов полевых шин, наиболее распространенные из которых приведены ниже:
1. Profibus DP
2. Profibus PA
3. Foundation Fieldbus
4. Modbus RTU
5. HART
6. DeviceNet
Несмотря на нюансы реализации каждого из стандартов (скорость передачи данных, формат кадра, физическая среда), у них есть одна общая черта – используемый алгоритм сетевого обмена данными, основанный на классическом принципе Master-Slave или его небольших модификациях.
Современные полевые шины удовлетворяют строгим техническим требованиям, благодаря чему становится возможной их эксплуатация в тяжелых промышленных условиях. К этим требованиям относятся:- Детерминированность. Под этим подразумевается, что передача сообщения из одного узла сети в другой занимает строго фиксированный отрезок времени. Офисные сети, построенные по технологии Ethernet, - это отличный пример недетерминированной сети. Сам алгоритм доступа к разделяемой среде по методу CSMA/CD не определяет время, за которое кадр из одного узла сети будет передан другому, и, строго говоря, нет никаких гарантий, что кадр вообще дойдет до адресата. Для промышленных сетей это недопустимо. Время передачи сообщения должно быть ограничено и в общем случае, с учетом количества узлов, скорости передачи данных и длины сообщений, может быть заранее рассчитано.
- Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
- Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
- Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходиться прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых окружающих условиях (в том числе агрессивных атмосферах).
По типу физической среды полевые шины делятся на два типа:
-
Полевые шины, построенные на базе оптоволоконного кабеля.
Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; иммунитет к электромагнитным помехам; возможность прокладки во взрывоопасных зонах.
Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами. -
Полевые шины, построенные на базе медного кабеля.
Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: удобоваримая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Итак, перейдем к рассмотрению методов обеспечения отказоустойчивости коммуникационных сетей, применяемых на полевом уровне. При проектировании и реализации этот аспект становится ключевым, так как в большой степени определяет характеристики надежности всей системы управления в целом.
На рисунке 2 изображена базовая архитектура полевой шины – одиночная (нерезервированная). Шина связывает контроллер С1 и четыре узла ввода/вывода IO1-IO4. Очевидно, что такая архитектура наименее отказоустойчива, так как обрыв шины, в зависимости от его локализации, ведет к потере коммуникации с одним, несколькими или всеми узлами шины. В нашем случае в результате обрыва теряется связь с двумя узлами.
Рис. 2. Нерезервированная шина.Здесь важное значение имеет термин “единичная точка отказа” (SPOF, single point of failure). Под этим понимается место в системе, отказ компонента или обрыв связи в котором приводит к нарушению работы всей системы. На рисунке 2 единичная точка отказа обозначена красным крестиком.
На рисунке 3 показана конфигурация в виде дублированной полевой шины, связывающей резервированный контроллер с узлами ввода/вывода. Каждый узел ввода/вывода снабжен двумя интерфейсными модулями. Если не считать сами модули ввода/вывода, которые резервируются редко, в данной конфигурации единичной точки отказа нет.
Рис. 3. Резервированная шина.Вообще, при построении отказоустойчивых АСУ ТП стараются, чтобы единичный отказ в любом компоненте (линии связи) не влиял на работу всей системы. В этом плане конфигурация в виде дублированной полевой шины является наиболее распространенным техническим решением.
На рисунке 4 показана конфигурация в виде оптоволоконного кольца. Контроллер и узлы ввода/вывода подключены к кольцу с помощью резервированных медных сегментов. Для состыковки медных сегментов сети с оптоволоконными применяются специальные конверторы среды передачи данных “медь<->оптоволокно” (OLM, Optical Link Module). Для каждого из стандартных протоколов можно выбрать соответствующий OLM.
Рис. 4. Одинарное оптоволоконное кольцо.Как и дублированная шина, оптоволоконное кольцо устойчиво к возникновению одного обрыва в любом его месте. Система такой обрыв вообще не заметит, и переключение на резервные интерфейсные и коммуникационные модули не произойдет. Более того, обрыв одного из двух медных сегментов, соединяющих узел с оптоволоконным кольцом, не приведет к потере связи с этим узлом. Однако второй обрыв кольца может привести к неработоспособности системы. В общем случае два обрыва кольца в диаметрально противоположных точках ведут к потере коммуникации с половиной подключенных узлов.
На рисунке 5 изображена конфигурация с двойным оптическим кольцом. В случае если в результате образования двух точек обрыва первичное кольцо выходит из строя, система переключается на вторичное кольцо. Очевидно, что такая архитектура сети является наиболее отказоустойчивой. На рисунке 5 пошагово изображен процесс деградации сети. Обратите внимание, сколько отказов система может перенести до того, как выйдет из строя.
Рис. 5. Резервированное оптоволоконное кольцо.[ http://kazanets.narod.ru/NT_PART1.htm]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > полевая шина
-
3 протокол управления простой сетью
протокол управления простой сетью
Протокол, управляющий сетью, сетевыми устройствами и их функциями.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
простой протокол сетевого управления
Прикладной протокол (L7) управления сетевыми устройствами. Основное предназначение состоит в получении подробной информации о состоянии устройства и изменении его конфигурации в автоматическом режиме. Помимо периодического считывания SNMP-сервером информации с устройства, возможна активная сигнализация самим устройством о произошедших событиях.
[ http://www.morepc.ru/dict/]
простой протокол управления сетью
Протокол группы IETF по управлению сетью. Основной протокол администрирования сетей TCP/IP, обеспечивающий мониторинг и контроль сетевых устройств, обслуживание их конфигураций, сбор статистических данных, замеры производительности и проверку безопасности (МСЭ-Т Х.805; МСЭ-Т J.116).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Вопросы сетевого управления традиционно входят в число основных как для производителей программ и оборудования, так и для организаций, занимающихся разработкой стандартов. Невероятно высокий темп развития сетей на базе протокола TCP/IP (и Internet в частности) и движение в сторону создания единой информационной магистрали обусловили необходимость разработки стандартного протокола управления устройствами по сети и множества высокоуровневых продуктов, которые его используют.
Протокол управления сетями определяет стандартный метод контроля какого-либо устройства со станции управления с целью определения его состояния, настроек и иной информации, а также ее модификации. Основным протоколом управления, используемым в семействе TCP/IP, является протокол SNMP (Simple Network Management Protocol простой протокол управления сетью). Сам протокол очень прост: он определяет только иерархическое пространство имен объектов управления и способ чтения (или записи) данных этих объектов на каждом узле. Основное преимущество этого протокола заключается в том, что он позволяет единообразным образом управлять всеми типами аппаратных средств, независимо от их назначения и особенностей. Все они говорят на одном языке и могут опрашиваться и конфигурироваться с центральной станции.
Однако, SNMP не более чем протокол, поддерживающий диалог двух сторон. Для его использования необходимы две составляющие: программа-агент, работающая на сетевом устройстве, и программа-менеджер, позволяющая дистанционно отслеживать и управлять сетевыми устройствами. Способ ведения диалога между агентом и менеджером показан на рис.1.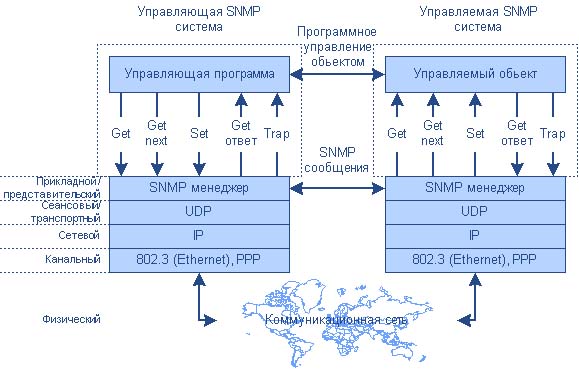
Рис. 1 Работа протокола SNMP в рамках модели OSI
Протокол SNMP традиционно используется для управления телекоммуникационным оборудованием. Для управления обычно применяются так называемые платформы сетевого управления, позволяющие осуществлять обнаружение устройств в сети, объединять модули управления оборудованием разных производителей, выполнять общие функции управления и оповещения. В число наиболее известных платформ сетевого управления входят HP OpenView (Hewlett-Packard), Solstice Domain Manager (Sun Microsystems), Tivoli NetView (Tivoli Systems), SNMPc (Castle Rock). Вместе с тем, управление с использованием SNMP может быть применено и для решения других задач в том числе для систем промышленного управления. Проиллюстрируем такой подход на реальном примере.
В ходе выполнения одного из экспортных контрактов корпорацией Стинс Коман была разработана, произведена и установлена на ТЭС Фалай (Вьетнам) система управления электрофильтром. Логически система была разделена на два уровня: нижний монтируемый в непосредственной близости от электрофильтра, и верхний осуществляющий сбор статистической информации и представляющий графически состояние всего объекта. От использования существующих SCADA-систем мы отказались из-за высокой стоимости пакета разработки и модулей времени выполнения, а также большого времени, необходимого на обучение разработчиков. Было решено пойти по пути собственной разработки. Связь между подсистемами верхнего и нижнего уровней была осуществлена традиционными для задач АСУ ТП методами. Из огромного количества используемых полевых протоколов был выбран один, наиболее подходящий по быстродействию и простоте реализации. Учитывая особенности этого протокола, был разработан программный комплекс, осуществляющий сбор информации, анализирующий статистику и графически представляющий состояние управляемого устройства.
Приступив к аналогичным работам по следующему контракту, мы постарались учесть уроки предыдущей разработки и при создании системы управления технологическими процессами воспользоваться нашим опытом проектирования больших сетевых комплексов. В новом варианте системы связь между уровнями осуществлялась по протоколу SNMP. В качестве программы верхнего уровня использовался описанный ниже универсальный SNMP-менеджер.
Использование принципов сетевого управления при создании систем управления технологическими процессами позволило избежать проблем, связанных с интеграцией различных уровней системы. Появился единый универсальный способ управления любым оборудованием, начиная от сетевого маршрутизатора и заканчивая электрофильтром. Для того чтобы появилась возможность управлять устройствами, которые ранее в принципе не подключались к сети, был разработан универсальный программно-аппаратный SNMP-агент eSCape. Это устройство построено на основе однокристального RISC-контроллера и для подключения к сети (локальной или территориально-распределенной) использует Ethernet или PPP. Оно обладает малым весом и невысокой стоимостью и предоставляет широкий выбор вариантов сопряжения с управляемым объектом.
При разработке системы промышленного управления, реализованной в виде SNMP-менеджера, изначально были сформулированы следующие требования:- новый программный продукт должен обеспечивать сбор и хранение статистических данных, которые должны легко импортироваться в другие программы;
- новый программный продукт должен работать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС Linux;
- новый программный продукт должен обеспечивать достаточное быстродействие на машинах бюджетного класса;
- для разработки программ рекомендуется использовать свободно распространяемые продукты с открытым исходным кодом.
В результате был разработан программный комплекс EscView, архитектура которого приведена на рис.2.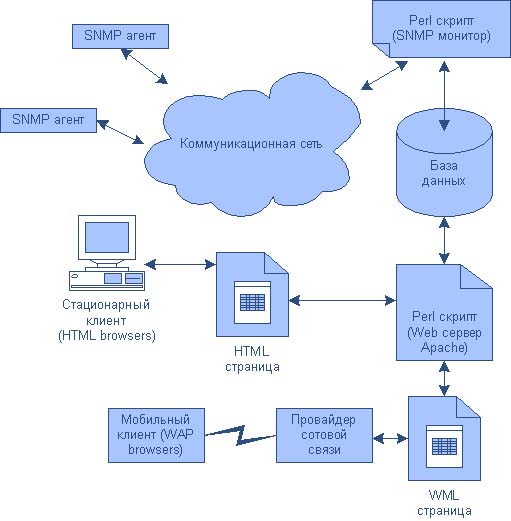
Рис.2 Программный комплекс, осуществляющий сбор информации, анализ статистики и графическое представление состояния управляемого устройства
Каждому управляемому устройству соответствует SNMP-агент, который может быть встроенным или внешним. SNMP-агенты, подключенные к сети протокола TCP/IP, периодически опрашиваются программой-монитором, которая написана на языке Perl. Периодичность и частота опроса, а также перечень интересующих SNMP-агентов записаны в базе данных, построенной на пакете программ MySQL. Все переменные, считанные в процессе опроса, сохраняются в базе данных. SNMP-агент может также сам проинформировать систему управления о том или ином изменении своего состояния. Для подачи команд устройствам необходимо изменить соответствующие поля базы данных. Все изменения, произошедшие в базе данных, адресно передаются SNMP-агентам.
Рис.3 Пример диалога с пользователем в формате HTML-страницы
Для реализации графического интерфейса пользователя используется HTTP-сервер Apache. Программа, написанная на языке Perl, поддерживает диалоги с пользователем и при помощи базы данных динамически формирует ответ в формате HTML-страницы или в формате WML-страницы.
Страницы HTML предназначены для пользователей, работающих с любым Internet-браузером (например, MS Internet Explorer или Netscape Navigator). Пример реального диалога представлен на рис.3. Страницы WML предназначены для мобильных устройств, поддерживающих протокол WAP (таким устройством может быть сотовый телефон). Для поддержки WAP-клиентов никаких специальных аппаратных доработок производить не надо: в качестве шлюза выступают ресурсы, штатно предоставляемые сотовыми операторами. Соединение между сотовым шлюзом и SNMP-менеджером осуществляется через Internet.
Данное решение может функционировать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС UNIX/Linux. Все программные продукты, используемые при разработке, распространяются свободно.
Описываемое решение уже используется для обслуживания мощных источников бесперебойного питания. В настоящее время на базе этого решения разрабатывается комплекс программ, предназначенных для управления электрофильтром. Оно, в частности, может использоваться для создания интеллектуальных зданий, для распределенного сбора информации с датчиков, а также для реализации заданного промышленного управления через типовые объединённые сети.
[ http://www.mka.ru/?p=40138]Тематики
Действия
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > протокол управления простой сетью
-
4 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
5 синхронизация времени
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Русско-английский словарь нормативно-технической терминологии > синхронизация времени
См. также в других словарях:
промышленная сеть верхнего уровня — коммуникационная сеть верхнего уровня сеть операторского уровня Сеть верхнего уровня АСУ ТП. Сеть передачи данных между операторскими станциями, контроллерами и серверами. [http://kazanets.narod.ru/NT PART2.htm] В данной статье речь пойдет о… … Справочник технического переводчика
зона — 3.11 зона: Пространство, содержащее логически сгруппированные элементы данных в МСП. Примечание Для МСП определяются семь зон. Источник: ГОСТ Р 52535.1 2006: Карты идентификационные. Машиносчитываемые дорожные документы. Часть 1. Машин … Словарь-справочник терминов нормативно-технической документации
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
СССР. Естественные науки — Математика Научные исследования в области математики начали проводиться в России с 18 в., когда членами Петербургской АН стали Л. Эйлер, Д. Бернулли и другие западноевропейские учёные. По замыслу Петра I академики иностранцы… … Большая советская энциклопедия
сопротивление — 3.93 сопротивление (resistance): Способность конструкции или части конструкции противостоять действию нагрузок. Источник: ГОСТ Р 54382 2011: Нефтяная и газовая промышленность. Подводные трубопроводные системы. Общие технические требования … Словарь-справочник терминов нормативно-технической документации
полевая шина — [Интент] полевая магистраль по зарубежной терминологии Имеет много терминов синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и … Справочник технического переводчика
полевая шина — [Интент] полевая магистраль по зарубежной терминологии Имеет много терминов синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и … Справочник технического переводчика
полевая шина — [Интент] полевая магистраль по зарубежной терминологии Имеет много терминов синонимов и обозначает специализированные последовательные магистрали малых локальных сетей (МЛС), ориентированны на сопряжение с ЭВМ рассредоточенных цифровых датчиков и … Справочник технического переводчика
ОСТ 68-13-99: Виды и процессы геодезической и картографической производственной деятельности. Термины и определения — Терминология ОСТ 68 13 99: Виды и процессы геодезической и картографической производственной деятельности. Термины и определения: 5.1.4 (геодезические) геодинамические измерения Производственный процесс, основным содержанием которого являются… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 25634-83: Каталог координат геодезических пунктов. Форма и содержание — Терминология ГОСТ 25634 83: Каталог координат геодезических пунктов. Форма и содержание оригинал документа: 1.1. Общие сведения 1.1.1. В каталоге помещены координаты геодезических пунктов, определенных в 1933 1968 гг. Плановые координаты x, у… … Словарь-справочник терминов нормативно-технической документации
Интернет в Белоруссии — В Беларуси действуют множество компаний посредников, оказывающих услуги по доступу в Интернет как физическим лицам, так и корпоративным клиентам. 1 февраля 2010 года Президентом Республики Беларусь[1] был подписан «Указ № 60 „О мерах по… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на английский
с английского на русский- С английского на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский